Initial commit with project files
This commit is contained in:
10
4_Farbrepräsentationen/README.md
Normal file
10
4_Farbrepräsentationen/README.md
Normal file
@@ -0,0 +1,10 @@
|
||||
# Farbrepräsentation
|
||||
|
||||
Die Wahrnehmung von "Farbe" wird in technischen Anwendungen in verschiedenen Formen dargestellt und codiert. Zu
|
||||
den Grundlagen der Farbrepräsentationen werden in diesem Kapitel Aufgaben und Beispiele bereitgestellt.
|
||||
Die Aufgaben behandeln die Themengebiete
|
||||
|
||||
- **Additive Subtraktive Farbmischung**
|
||||
- **Farbempfinden und technische Repräsentation von Farbe**
|
||||
- **Farbmodelle/Farbräume und Konvertierung**
|
||||
- **Weißabgleich**
|
||||
35
4_Farbrepräsentationen/ü1/README.md
Normal file
35
4_Farbrepräsentationen/ü1/README.md
Normal file
@@ -0,0 +1,35 @@
|
||||
# Übung 1: BGR zu HSV
|
||||
|
||||
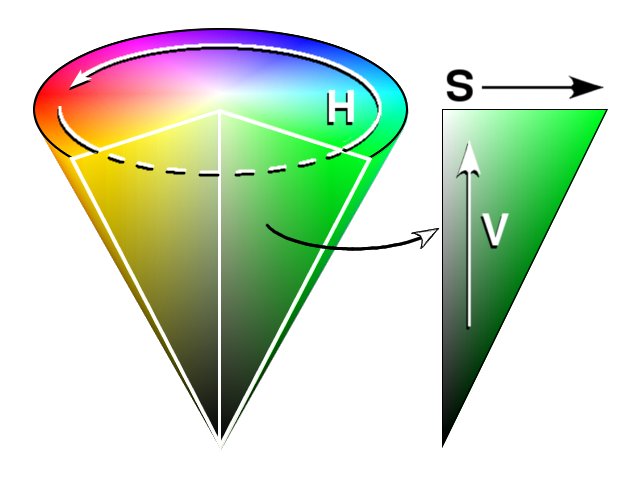
In dieser Übung wird der HSV Farbraum betrachtet. Die Information der Farbe wird
|
||||
durch die drei Werte
|
||||
|
||||
- H: Helligkeit (Hue)
|
||||
- S: Sättigung (Saturation)
|
||||
- V: Value (Helligkeit)
|
||||
|
||||
repräsentiert.
|
||||
|
||||
In der folgenden Abbildung wird der Farbraum visuell dargestellt:
|
||||
|
||||
|
||||
|
||||
|
||||
## Aufgabe a)
|
||||
In der Datei *a.py* wird ein Bild geladen. Nach dem Laden befindet sich das Bild
|
||||
im BGR-Farbraum. Konvertieren Sie das Bild manuell und
|
||||
ohne Hilfe von OpenCV in den HSV Farbraum.
|
||||
|
||||
Sie können die Rechenvorschriften der Konvertierung von RGB zu HSV aus der [OpenCV-Dokumentation](https://docs.opencv.org/3.4/de/d25/imgproc_color_conversions.html)
|
||||
nutzen. Beachten Sie, dass die Farbkanäle in OpenCV in BGR und nicht in RGB abgespeichert sind!
|
||||
|
||||
|
||||
## Aufgabe b)
|
||||
Konvertieren Sie das Bild mithilfe der OpenCV Funktion ```cv2.cvtColor()``` in den HSV
|
||||
Farbraum. Vergleichen Sie das Ergebnis dann mit dem Ergebnis aus Aufgabenteil a).
|
||||
|
||||
Sind die Ergebnisse gleich? Wenn nicht, woran kann es liegen?
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
39
4_Farbrepräsentationen/ü1/a.py
Normal file
39
4_Farbrepräsentationen/ü1/a.py
Normal file
@@ -0,0 +1,39 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
|
||||
# Einlesen des Bildes
|
||||
filepath = "../../data/balls.png"
|
||||
|
||||
|
||||
''' a) Manuelles Konvertieren '''
|
||||
img_norm = img.astype(np.float32) / 255.0
|
||||
height, width, channels = img.shape
|
||||
hsv_img = np.zeros_like(img_norm)
|
||||
|
||||
for x in range(width):
|
||||
for y in range(int(height)):
|
||||
|
||||
|
||||
hsv_img = np.round(hsv_img * 255)
|
||||
hsv_img = hsv_img.astype(np.uint8)
|
||||
|
||||
''' b) Konvertieren mit OpenCV '''
|
||||
hsv_img2 =
|
||||
|
||||
|
||||
''' Das Ergebnis überprüfen '''
|
||||
img2 = cv2.cvtColor(hsv_img, cv2.COLOR_HSV2BGR)
|
||||
img3 = cv2.cvtColor(hsv_img2, cv2.COLOR_HSV2BGR)
|
||||
|
||||
difference = np.sum(np.abs(img2 - img3))
|
||||
print("Totale Differenz zwischen den Ergebnissen:", difference)
|
||||
max_difference = np.max(np.abs(img2 - img3))
|
||||
print("Maximale Abweichung pro Pixel/Kanal:", max_difference)
|
||||
example_differences = img2[0:10, 0:10] - img3[0:10, 0:10]
|
||||
print("Beispiel Differenzen:\n", example_differences)
|
||||
|
||||
cv2.imshow("ORIGINAL", img)
|
||||
cv2.imshow("MANUELL", img2)
|
||||
cv2.imshow("OPENCV", img3)
|
||||
cv2.waitKey(0)
|
||||
66
4_Farbrepräsentationen/ü1/l_a.py
Normal file
66
4_Farbrepräsentationen/ü1/l_a.py
Normal file
@@ -0,0 +1,66 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
|
||||
# Einlesen des Bildes
|
||||
filepath = "../../data/balls.png"
|
||||
img = cv2.imread(filepath)
|
||||
|
||||
''' a) Manuelles Konvertieren '''
|
||||
img_norm = img.astype(np.float32) / 255.0
|
||||
height, width, channels = img.shape
|
||||
hsv_img = np.zeros_like(img_norm)
|
||||
|
||||
for x in range(width):
|
||||
for y in range(int(height)):
|
||||
minimum = np.min(img_norm[y, x])
|
||||
b, g, r = img_norm[y, x, 0], img_norm[y, x, 1], img_norm[y, x, 2]
|
||||
# V Wert
|
||||
v = np.max(img_norm[y, x].copy())
|
||||
|
||||
# S Wert
|
||||
if v == 0:
|
||||
s = 0
|
||||
else:
|
||||
s = (v - minimum) / v
|
||||
|
||||
# H Wert
|
||||
max_channel_index = np.argmax(img_norm[y, x])
|
||||
if (v - np.min(img_norm[y, x])) == 0:
|
||||
h = np.zeros(1)
|
||||
elif max_channel_index == 2: # Rot
|
||||
h = 60 * (g - b) / (v - minimum)
|
||||
elif max_channel_index == 1: # Grün
|
||||
h = 120 + 60 * (b - r) / (v - minimum)
|
||||
else: # Blau
|
||||
h = 240 + 60 * (r - g) / (v - minimum)
|
||||
if h < 0:
|
||||
h += 360
|
||||
h /= (2 * 255)
|
||||
|
||||
hsv_img[y, x, 0] = h
|
||||
hsv_img[y, x, 1] = s
|
||||
hsv_img[y, x, 2] = v
|
||||
|
||||
hsv_img = np.round(hsv_img * 255)
|
||||
hsv_img = hsv_img.astype(np.uint8)
|
||||
|
||||
''' b) Konvertieren mit OpenCV '''
|
||||
hsv_img2 = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
|
||||
|
||||
|
||||
''' Das Ergebnis überprüfen '''
|
||||
img2 = cv2.cvtColor(hsv_img, cv2.COLOR_HSV2BGR)
|
||||
img3 = cv2.cvtColor(hsv_img2, cv2.COLOR_HSV2BGR)
|
||||
|
||||
difference = np.sum(np.abs(img2 - img3))
|
||||
print("Totale Differenz zwischen den Ergebnissen:", difference)
|
||||
max_difference = np.max(np.abs(img2 - img3))
|
||||
print("Maximale Abweichung pro Pixel/Kanal:", max_difference)
|
||||
example_differences = img2[0:3, 0:3] - img3[0:3, 0:3]
|
||||
print("Beispiel Differenzen:\n", example_differences)
|
||||
|
||||
cv2.imshow("ORIGINAL", img)
|
||||
cv2.imshow("MANUELL", img2)
|
||||
cv2.imshow("OPENCV", img3)
|
||||
cv2.waitKey(0)
|
||||
32
4_Farbrepräsentationen/ü2/README.md
Normal file
32
4_Farbrepräsentationen/ü2/README.md
Normal file
@@ -0,0 +1,32 @@
|
||||
# Übung 2: BGR zu HSV
|
||||
|
||||
In dieser Übung wird der HSV Farbraum betrachtet. Die Information der Farbe wird
|
||||
durch die drei Werte
|
||||
|
||||
- H: Helligkeit (Hue)
|
||||
- S: Sättigung (Saturation)
|
||||
- V: Value (Helligkeit)
|
||||
|
||||
repräsentiert.
|
||||
|
||||
In der folgenden Abbildung wird der Farbraum visuell dargestellt:
|
||||
|
||||

|
||||
|
||||
|
||||
## Aufgabe a)
|
||||
Lesen Sie Ihre Kamera aus und geben Sie das Bild "live" wieder.
|
||||
Konvertieren Sie den eingelesenen Videostream aus Aufgabe in den HSV Farbraum.
|
||||
Reduzieren Sie die Helligkeit, indem Sie einen der drei Farbkanäle um 30% reduzieren.
|
||||
Konvertieren Sie das Bild daraufhin zurück in den RGB Farbraum.
|
||||
|
||||
Die Lösung findet sich in der Datei [l_a.py](l_a.py).
|
||||
|
||||
## Aufgabe b)
|
||||
Modifizieren Sie Aufgabe a) so, dass die Helligkeit zyklisch zwischen 0% und 100%
|
||||
variiert.
|
||||
Die Lösung findet sich in der Datei [l_b.py](l_b.py).
|
||||
|
||||
|
||||
|
||||
|
||||
0
4_Farbrepräsentationen/ü2/a.py
Normal file
0
4_Farbrepräsentationen/ü2/a.py
Normal file
24
4_Farbrepräsentationen/ü2/l_a.py
Normal file
24
4_Farbrepräsentationen/ü2/l_a.py
Normal file
@@ -0,0 +1,24 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
camera = cv2.VideoCapture(0)
|
||||
|
||||
signum = 1
|
||||
factor = 0.3
|
||||
while True:
|
||||
ret, bgr = camera.read()
|
||||
|
||||
''' Aufgabe a) '''
|
||||
hsv = cv2.cvtColor(bgr, cv2.COLOR_BGR2HSV)
|
||||
hsv[:, :, 2] = np.round(hsv[:, :, 2] * factor)
|
||||
bgr = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
|
||||
|
||||
''' Visualisierung '''
|
||||
# Display the resulting frame
|
||||
cv2.imshow('frame', bgr)
|
||||
if 27 == cv2.waitKey(1): # Taste "q"
|
||||
break
|
||||
|
||||
# When everything done, release the capture
|
||||
camera.release()
|
||||
cv2.destroyAllWindows()
|
||||
33
4_Farbrepräsentationen/ü2/l_b.py
Normal file
33
4_Farbrepräsentationen/ü2/l_b.py
Normal file
@@ -0,0 +1,33 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
camera = cv2.VideoCapture(0)
|
||||
|
||||
signum = 1
|
||||
factor = 0.3
|
||||
while True:
|
||||
ret, bgr = camera.read()
|
||||
|
||||
''' Aufgabe a) '''
|
||||
hsv = cv2.cvtColor(bgr, cv2.COLOR_BGR2HSV)
|
||||
hsv[:, :, 2] = np.round(hsv[:, :, 2] * factor)
|
||||
bgr = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
|
||||
|
||||
''' Aufgabe b) '''
|
||||
if factor == 0:
|
||||
signum = 1
|
||||
elif factor == 1:
|
||||
signum = -1
|
||||
factor += signum * 0.02
|
||||
factor = min(1, factor)
|
||||
factor = max(0, factor)
|
||||
|
||||
''' Visualisierung '''
|
||||
# Display the resulting frame
|
||||
cv2.imshow('frame', bgr)
|
||||
if 27 == cv2.waitKey(1): # Taste "q"
|
||||
break
|
||||
|
||||
# When everything done, release the capture
|
||||
camera.release()
|
||||
cv2.destroyAllWindows()
|
||||
22
4_Farbrepräsentationen/ü3/README.md
Normal file
22
4_Farbrepräsentationen/ü3/README.md
Normal file
@@ -0,0 +1,22 @@
|
||||
# Übung 3: Binärbild Repräsentationen
|
||||
|
||||
In dieser Übung werden Darstellungsformen von Binärbildern betrachtet. Sie lernen Binär und Quaternärbäume kennen.
|
||||
|
||||
|
||||
## Aufgabe a) Binärbaum
|
||||
Gegeben ist folgender Binärbaum:
|
||||
|
||||

|
||||
|
||||
Rekonstruieren Sie die Bildzeile, die durch den Binärbaum dargestellt wird.
|
||||
Sie können die Aufgabe mit Papier und Stift erledigen. Die Lösung wird in dem Skript *l_a.py* visualisiert.
|
||||
|
||||
## Aufgabe b) Quaternärbaum
|
||||
Gegeben ist folgender Quaternärbaum (Quadtree) mit einer Zuordnung der vier Quadranten:
|
||||

|
||||
|
||||
Rekonstruieren Sie das Binärbild, die durch den Quaternärbaum dargestellt wird.
|
||||
Sie können die Aufgabe mit Papier und Stift erledigen. Die Lösung wird in dem Skript *l_b.py* visualisiert.
|
||||
|
||||
|
||||
|
||||
BIN
4_Farbrepräsentationen/ü3/data/binary_tree.png
Normal file
BIN
4_Farbrepräsentationen/ü3/data/binary_tree.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 4.6 KiB |
BIN
4_Farbrepräsentationen/ü3/data/quad_tree.png
Normal file
BIN
4_Farbrepräsentationen/ü3/data/quad_tree.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 17 KiB |
16
4_Farbrepräsentationen/ü3/l_a.py
Normal file
16
4_Farbrepräsentationen/ü3/l_a.py
Normal file
@@ -0,0 +1,16 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
line = np.asarray(
|
||||
[[1, 1, 0, 0, 1, 0, 0, 0, 1, 1, 1, 1, 0, 1, 0, 1]],
|
||||
)
|
||||
# Resize image
|
||||
line = np.repeat(line, 50, axis=1)
|
||||
line = np.repeat(line, 50, axis=0)
|
||||
# Add seperators
|
||||
line[0::2, ::50] = 1
|
||||
line[1::2, ::50] = 0
|
||||
# Show image
|
||||
line = line.astype(np.float64)
|
||||
cv2.imshow("Binaerbaum", line)
|
||||
cv2.waitKey(0)
|
||||
32
4_Farbrepräsentationen/ü3/l_b.py
Normal file
32
4_Farbrepräsentationen/ü3/l_b.py
Normal file
@@ -0,0 +1,32 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
line = np.asarray(
|
||||
[
|
||||
[1,1, 1,1, 1,1, 1,1],
|
||||
[0,0, 1,1, 1,1, 1,1],
|
||||
|
||||
[0,0, 1,1, 0,0, 0,1],
|
||||
[0,0, 1,0, 0,0, 1,1],
|
||||
|
||||
[0,0, 0,0, 0,0, 1,1],
|
||||
[0,0, 0,0, 0,0, 1,1],
|
||||
|
||||
[0,0, 0,0, 1,0, 1,1],
|
||||
[0,0, 0,0, 1,1, 1,1],
|
||||
],
|
||||
)
|
||||
# Resize image
|
||||
line = np.repeat(line, 50, axis=1)
|
||||
line = np.repeat(line, 50, axis=0)
|
||||
|
||||
# Add seperators
|
||||
line[0::2, ::50] = 1
|
||||
line[1::2, ::50] = 0
|
||||
line[::50, 0::2] = 1
|
||||
line[::50, 1::2] = 0
|
||||
|
||||
# Show image
|
||||
line = line.astype(np.float64)
|
||||
cv2.imshow("Quadtree", line)
|
||||
cv2.waitKey(0)
|
||||
25
4_Farbrepräsentationen/ü4/README.md
Normal file
25
4_Farbrepräsentationen/ü4/README.md
Normal file
@@ -0,0 +1,25 @@
|
||||
# Übung 4: Weißabgleich
|
||||
|
||||
Bei Digitalaufnahmen lässt sich über Bildverarbeitungssoftware der Weißabgleich zu einem gewissen
|
||||
Grad per Software korrigieren. Dazu skaliert man die relativen Luminanzen der Kanäle Rot,
|
||||
Grün und Blau. Die Skalierung wird über eine Multiplikation mit der folgenden Diagonalmatrix
|
||||
realisiert.
|
||||
|
||||
<p align="center">
|
||||
<img src="https://latex.codecogs.com/svg.image?\begin{bmatrix}&space;R&space;\\G&space;\\B&space;\\\end{bmatrix}&space;=&space;\begin{bmatrix}&space;r_w&space;&&space;0&space;&&space;0\\&space;0&g_w&space;&0&space;\\0&0&b_w&space;\\\end{bmatrix}&space;\cdot\begin{bmatrix}&space;R'&space;\\G'&space;\\B'&space;\\\end{bmatrix}&space;" title="\begin{bmatrix} R \\G \\B \\\end{bmatrix} = \begin{bmatrix} r_w & 0 & 0\\ 0&g_w &0 \\0&0&b_w \\\end{bmatrix} \cdot\begin{bmatrix} R' \\G' \\B' \\\end{bmatrix} " />
|
||||
</p>
|
||||
|
||||
Das Problem ist nun die Parameter für den optimalen Weißpunkt zu wählen.
|
||||
|
||||
## Aufgabe a)
|
||||
|
||||
Laden Sie das Bild [../../data/obst.png](../../data/obst.png) und geben Sie er aus. Führen Sie danach den Weißabgleich durch.
|
||||
Wählen Sie als Parameter Werte, sodass die Farbwerte des Pixels an Stelle x=127 y=146 den Farbwert (255, 255, 255) haben.
|
||||
Zeigen Sie ebenfalls das abgeglichene Bild an. Die Musterlösung findet sich in der Datei [l_a.py](l_a.py).
|
||||
|
||||

|
||||
|
||||
## Aufgabe b)
|
||||
|
||||
Führen Sie den Weißabgleich auf Ihrem Webcam-Stream durch. Sie können die Parameter frei wählen und variieren.
|
||||
Die Musterlösung findet sich in der Datei [l_b.py](l_b.py).
|
||||
19
4_Farbrepräsentationen/ü4/l_a.py
Normal file
19
4_Farbrepräsentationen/ü4/l_a.py
Normal file
@@ -0,0 +1,19 @@
|
||||
import cv2
|
||||
import numpy as np
|
||||
|
||||
img = cv2.imread("../../data/model.png")
|
||||
|
||||
#white_balancing_factor = np.asarray([[[1, 1, 1]]])
|
||||
white_balancing_factor = 255 / img[146, 127].astype(np.float32)
|
||||
white_balancing_factor = np.expand_dims(white_balancing_factor, 0)
|
||||
white_balancing_factor = np.expand_dims(white_balancing_factor, 1)
|
||||
|
||||
img_balanced = img * white_balancing_factor
|
||||
img_balanced = np.clip(img_balanced, 0, 255)
|
||||
img_balanced = img_balanced.astype(np.uint8)
|
||||
|
||||
cv2.imshow("Normal", img)
|
||||
cv2.imshow("Abgeglichen", img_balanced)
|
||||
|
||||
cv2.waitKey()
|
||||
|
||||
16
4_Farbrepräsentationen/ü4/l_b.py
Normal file
16
4_Farbrepräsentationen/ü4/l_b.py
Normal file
@@ -0,0 +1,16 @@
|
||||
import cv2
|
||||
import numpy as np
|
||||
|
||||
white_balancing_factor = np.asarray([[[0.5, 0.3, 0.95]]])
|
||||
|
||||
cap = cv2.VideoCapture(0)
|
||||
|
||||
while True:
|
||||
ret, img = cap.read()
|
||||
img_balanced = img * white_balancing_factor
|
||||
img_balanced = np.clip(img_balanced, 0, 255)
|
||||
img_balanced = img_balanced.astype(np.uint8)
|
||||
cv2.imshow("Normal", img)
|
||||
cv2.imshow("Abgeglichen", img_balanced)
|
||||
cv2.waitKey(1)
|
||||
|
||||
45
4_Farbrepräsentationen/ü5/README.md
Normal file
45
4_Farbrepräsentationen/ü5/README.md
Normal file
@@ -0,0 +1,45 @@
|
||||
# Übung 5: Kettencode
|
||||
|
||||
Eine Variante für die Abbildung von Konturen is der Kettencode. Im folgenden sollten Bilder in den Kettencode codiert und
|
||||
Kettencodes in Konturen decodiert werden.
|
||||
|
||||
Für die Codierung mit dem Kettencode soll folgende Zuordnung verwendet werden:
|
||||
<p align="center">
|
||||
<img src="https://latex.codecogs.com/gif.latex?\begin{bmatrix}&space;3&space;&&space;2&space;&&space;1&space;\\&space;4&space;&&space;&&space;0\\&space;5&space;&&space;6&space;&&space;7&space;\end{bmatrix}" />
|
||||
</p>
|
||||
|
||||
|
||||
Für die Codierung mit dem differentiellen Kettencode soll folgende Zuordnung verwendet werden:
|
||||
<p align="center">
|
||||
<img src="https://latex.codecogs.com/gif.latex?\begin{bmatrix}&space;+3&space;&&space;+2&space;&&space;+1&space;\\&space;4&space;&&space;&&space;0\\&space;-3&space;&&space;-2&space;&&space;-1&space;\end{bmatrix}" />
|
||||
</p>
|
||||
|
||||
|
||||
|
||||
## Aufgabe a) Kettencode
|
||||
|
||||
Erstellen Sie für das Bild
|
||||
|
||||

|
||||
|
||||
einen Kettencode! Beginnen Sie mit dem weißen Pixel oben links und dem Wert 0.
|
||||
|
||||
## Aufgabe b) Kettencode
|
||||
|
||||
Erstellen Sie das Bild für den Kettencode
|
||||
|
||||
```[6 4 6 3 4 5 6 4 2 2 3 2 2 0 0 7 0 2 0 0 7 6]```
|
||||
|
||||
|
||||
## Aufgabe c) Differentieller Kettencode
|
||||
|
||||
Erstellen Sie für das Bild aus Aufgabe a)
|
||||
einen differenziellen Kettencode! Beginnen Sie mit dem Pixel oben links und dem Wert 0.
|
||||
|
||||
## Aufgabe d) Differentieller Kettencode
|
||||
|
||||
Erstellen Sie das Bild für den differentiellen Kettencode
|
||||
|
||||
```[-2 -2 2 -3 1 1 1 -2 -2 0 1 -1 0 -2 0 -1 1 2 -2 0 -1 -1]```
|
||||
|
||||
Nutzen Sie als Startrichtung die Richtung 0 nach Definition des Kettencodes.
|
||||
BIN
4_Farbrepräsentationen/ü5/data/1.png
Normal file
BIN
4_Farbrepräsentationen/ü5/data/1.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 4.4 KiB |
34
4_Farbrepräsentationen/ü5/l_a.py
Normal file
34
4_Farbrepräsentationen/ü5/l_a.py
Normal file
@@ -0,0 +1,34 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
line = np.asarray(
|
||||
[
|
||||
[0,0, 0,0, 0,0, 0,0],
|
||||
[1,1, 1,0, 1,1, 1,0],
|
||||
[1,0, 0,1, 1,0, 0,1],
|
||||
[1,0, 0,0, 0,0, 1,1],
|
||||
[0,1, 0,1, 1,1, 1,0],
|
||||
[0,1, 1,0, 0,1, 0,0],
|
||||
[0,1, 1,0, 0,0, 0,0],
|
||||
[0,0, 0,0, 0,0, 0,0],
|
||||
],
|
||||
)
|
||||
|
||||
# Resize image
|
||||
line = np.repeat(line, 50, axis=1)
|
||||
line = np.repeat(line, 50, axis=0)
|
||||
|
||||
# Add seperators
|
||||
line[0::2, ::50] = 1
|
||||
line[1::2, ::50] = 0
|
||||
line[::50, 0::2] = 1
|
||||
line[::50, 1::2] = 0
|
||||
|
||||
# Show image
|
||||
line = line.astype(np.float64)
|
||||
cv2.imshow("1", line)
|
||||
cv2.imwrite("./data/1.png", line*255)
|
||||
cv2.waitKey(0)
|
||||
|
||||
chaincode = [0, 0, 7, 0, 2, 0, 0, 7, 6, 4, 6, 4, 6, 3, 4, 5, 6, 4, 2, 2, 3, 2]
|
||||
print(chaincode)
|
||||
29
4_Farbrepräsentationen/ü5/l_b.py
Normal file
29
4_Farbrepräsentationen/ü5/l_b.py
Normal file
@@ -0,0 +1,29 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
line = np.asarray(
|
||||
[
|
||||
[0,0, 0,0, 0,0, 0,0],
|
||||
[1,1, 1,0, 1,1, 1,0],
|
||||
[1,0, 0,1, 1,0, 0,1],
|
||||
[1,0, 0,0, 0,0, 1,1],
|
||||
[0,1, 0,1, 1,1, 1,0],
|
||||
[0,1, 1,0, 0,1, 0,0],
|
||||
[0,1, 1,0, 0,0, 0,0],
|
||||
[0,0, 0,0, 0,0, 0,0],
|
||||
],
|
||||
)
|
||||
# Resize image
|
||||
line = np.repeat(line, 50, axis=1)
|
||||
line = np.repeat(line, 50, axis=0)
|
||||
|
||||
# Add seperators
|
||||
line[0::2, ::50] = 1
|
||||
line[1::2, ::50] = 0
|
||||
line[::50, 0::2] = 1
|
||||
line[::50, 1::2] = 0
|
||||
|
||||
# Show image
|
||||
line = line.astype(np.float64)
|
||||
cv2.imshow("b", line)
|
||||
cv2.waitKey(0)
|
||||
33
4_Farbrepräsentationen/ü5/l_c.py
Normal file
33
4_Farbrepräsentationen/ü5/l_c.py
Normal file
@@ -0,0 +1,33 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
line = np.asarray(
|
||||
[
|
||||
[0,0, 0,0, 0,0, 0,0],
|
||||
[1,1, 1,0, 1,1, 1,0],
|
||||
[1,0, 0,1, 1,0, 0,1],
|
||||
[1,0, 0,0, 0,0, 1,1],
|
||||
[0,1, 0,1, 1,1, 1,0],
|
||||
[0,1, 1,0, 0,1, 0,0],
|
||||
[0,1, 1,0, 0,0, 0,0],
|
||||
[0,0, 0,0, 0,0, 0,0],
|
||||
],
|
||||
)
|
||||
# Resize image
|
||||
line = np.repeat(line, 50, axis=1)
|
||||
line = np.repeat(line, 50, axis=0)
|
||||
|
||||
# Add seperators
|
||||
line[0::2, ::50] = 1
|
||||
line[1::2, ::50] = 0
|
||||
line[::50, 0::2] = 1
|
||||
line[::50, 1::2] = 0
|
||||
|
||||
# Show image
|
||||
#line = line.astype(np.float64)
|
||||
#cv2.imshow("1", line)
|
||||
#cv2.imwrite("./data/1.png", line*255)
|
||||
#cv2.waitKey(0)
|
||||
|
||||
chaincode = [0, 0, -1, 1, 2, -2, 0, -1, -1, -2, 2, -2, 2, -3, 1, 1, 1, -2, -2, 0, 1, -1]
|
||||
print(chaincode)
|
||||
29
4_Farbrepräsentationen/ü5/l_d.py
Normal file
29
4_Farbrepräsentationen/ü5/l_d.py
Normal file
@@ -0,0 +1,29 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
|
||||
line = np.asarray(
|
||||
[
|
||||
[0,0, 0,0, 0,0, 0,0],
|
||||
[1,1, 1,0, 1,1, 1,0],
|
||||
[1,0, 0,1, 1,0, 0,1],
|
||||
[1,0, 0,0, 0,0, 1,1],
|
||||
[0,1, 0,1, 1,1, 1,0],
|
||||
[0,1, 1,0, 0,1, 0,0],
|
||||
[0,1, 1,0, 0,0, 0,0],
|
||||
[0,0, 0,0, 0,0, 0,0],
|
||||
],
|
||||
)
|
||||
# Resize image
|
||||
line = np.repeat(line, 50, axis=1)
|
||||
line = np.repeat(line, 50, axis=0)
|
||||
|
||||
# Add seperators
|
||||
line[0::2, ::50] = 1
|
||||
line[1::2, ::50] = 0
|
||||
line[::50, 0::2] = 1
|
||||
line[::50, 1::2] = 0
|
||||
|
||||
# Show image
|
||||
line = line.astype(np.float64)
|
||||
cv2.imshow("d", line)
|
||||
cv2.waitKey(0)
|
||||
39
4_Farbrepräsentationen/ü6/README.md
Normal file
39
4_Farbrepräsentationen/ü6/README.md
Normal file
@@ -0,0 +1,39 @@
|
||||
# Übung 6: Additive / Subtraktive Farbmischung
|
||||
|
||||
In dieser Übung soll die Additive und Subtraktive Farbmischung betrachtet werden.
|
||||
Es soll ein simples Bild mit der Auflösung 500x300 (BxH) erstellt und angezeigt werden, in der jeweils
|
||||
von oben aufsteigend jeweils 50 Pixel in der Farbe
|
||||
- rot
|
||||
- orange
|
||||
- gelb
|
||||
- grün
|
||||
- blau
|
||||
- lila
|
||||
|
||||
In dieser Übung haben Sie die beiden Farbrepräsentationen "Additiv BGR" und "Subtraktiv BGR" zur Verfügung.
|
||||
In der folgenden Tabelle sind beide Repräsentationen dargestellt:
|
||||
|
||||
| Additiv | Subtraktiv |
|
||||
| --- | --- |
|
||||
| | |
|
||||
|
||||
Bei der Additiven Farbmischung wird eine Farbe durch das Hinzufügen von Farbe zum Komplementär Schwarz erreicht.
|
||||
Auf dem Rechner entsprechen daher höhere Werte in einem Farbkanal einer stärkeren Präsenz der Farbe im resultierenden
|
||||
Pixel.
|
||||
|
||||
Bei der Subtraktiven Farbmischung wird eine Farbe durch das Abziehen von Farbe zum Komplementär Weiß erreicht.
|
||||
Auf dem Rechner entsprechen daher höhere Werte in einem Farbkanal einer geringeren Präsenz der Farbe im resultierenden
|
||||
Pixel.
|
||||
|
||||
|
||||
## Aufgabe a)
|
||||
|
||||
In der Datei [a.py](a.py) ist ein leeres Bild vordefiniert. Ergänzen Sie die Farben, um das Bild zu vervollständigen.
|
||||
In dieser Aufgabe wird eine Farbe im additiven BGR Farbraum dargestellt. Die Musterlösung findet sich in der Datei [l_a.py](l_a.py).
|
||||
|
||||
|
||||
## Aufgabe b)
|
||||
|
||||
In der Datei [b.py](b.py) ist ein leeres Bild vordefiniert. Ergänzen Sie die Farben, um das Bild zu vervollständigen.
|
||||
In dieser Aufgabe wird eine Farbe im subtraktiven BGR Farbraum dargestellt. Die Musterlösung findet sich in der Datei [l_b.py](l_b.py).
|
||||
|
||||
14
4_Farbrepräsentationen/ü6/a.py
Normal file
14
4_Farbrepräsentationen/ü6/a.py
Normal file
@@ -0,0 +1,14 @@
|
||||
import numpy as np
|
||||
|
||||
from color_code import additive_color_plot
|
||||
|
||||
img = np.zeros((300, 500, 3), dtype=np.uint8)
|
||||
|
||||
img[0:50, 0:500] = [0, 0, 0]
|
||||
img[50:100, 0:500] = [0, 0, 0]
|
||||
img[100:150, 0:500] = [0, 0, 0]
|
||||
img[150:200, 0:500] = [0, 0, 0]
|
||||
img[200:250, 0:500] = [0, 0, 0]
|
||||
img[250:300, 0:500] = [0, 0, 0]
|
||||
|
||||
additive_color_plot(img)
|
||||
14
4_Farbrepräsentationen/ü6/b.py
Normal file
14
4_Farbrepräsentationen/ü6/b.py
Normal file
@@ -0,0 +1,14 @@
|
||||
import numpy as np
|
||||
|
||||
from color_code import subtractive_color_plot
|
||||
|
||||
img = np.zeros((300, 500, 3), dtype=np.uint8)
|
||||
|
||||
img[0:50, 0:500] = [0, 0, 0]
|
||||
img[50:100, 0:500] = [0, 0, 0]
|
||||
img[100:150, 0:500] = [0, 0, 0]
|
||||
img[150:200, 0:500] = [0, 0, 0]
|
||||
img[200:250, 0:500] = [0, 0, 0]
|
||||
img[250:300, 0:500] = [0, 0, 0]
|
||||
|
||||
subtractive_color_plot(img)
|
||||
12
4_Farbrepräsentationen/ü6/color_code.py
Normal file
12
4_Farbrepräsentationen/ü6/color_code.py
Normal file
@@ -0,0 +1,12 @@
|
||||
import cv2
|
||||
|
||||
|
||||
def additive_color_plot(img):
|
||||
cv2.imshow("Additive", img)
|
||||
cv2.waitKey(0)
|
||||
|
||||
|
||||
def subtractive_color_plot(img):
|
||||
img = 255 - img
|
||||
cv2.imshow("Subtractive", img)
|
||||
cv2.waitKey(0)
|
||||
BIN
4_Farbrepräsentationen/ü6/data/add.png
Normal file
BIN
4_Farbrepräsentationen/ü6/data/add.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 6.8 KiB |
BIN
4_Farbrepräsentationen/ü6/data/sub.png
Normal file
BIN
4_Farbrepräsentationen/ü6/data/sub.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 7.3 KiB |
14
4_Farbrepräsentationen/ü6/l_a.py
Normal file
14
4_Farbrepräsentationen/ü6/l_a.py
Normal file
@@ -0,0 +1,14 @@
|
||||
import numpy as np
|
||||
|
||||
from color_code import additive_color_plot
|
||||
|
||||
img = np.zeros((300, 500, 3), dtype=np.uint8)
|
||||
|
||||
img[0:50, 0:500] = [0, 0, 255]
|
||||
img[50:100, 0:500] = [0, 136, 255]
|
||||
img[100:150, 0:500] = [0, 255, 255]
|
||||
img[150:200, 0:500] = [0, 255, 0]
|
||||
img[200:250, 0:500] = [255, 0, 0]
|
||||
img[250:300, 0:500] = [255, 0, 136]
|
||||
|
||||
additive_color_plot(img)
|
||||
14
4_Farbrepräsentationen/ü6/l_b.py
Normal file
14
4_Farbrepräsentationen/ü6/l_b.py
Normal file
@@ -0,0 +1,14 @@
|
||||
import numpy as np
|
||||
|
||||
from color_code import subtractive_color_plot
|
||||
|
||||
img = np.zeros((300, 500, 3), dtype=np.uint8)
|
||||
|
||||
img[0:50, 0:500] = [255, 255, 0]
|
||||
img[50:100, 0:500] = [255, 119, 0]
|
||||
img[100:150, 0:500] = [255, 0, 0]
|
||||
img[150:200, 0:500] = [255, 0, 255]
|
||||
img[200:250, 0:500] = [0, 255, 255]
|
||||
img[250:300, 0:500] = [0, 255, 119]
|
||||
|
||||
subtractive_color_plot(img)
|
||||
Reference in New Issue
Block a user